BinKinematics_CylinderCylinder class
Contents
Description
This is a sub-class of the BinKinematics class for the implementation of the Cylinder-Cylinder binary kinematics for particle-particle interactions of type Particle Cylinder.
classdef BinKinematics_CylinderCylinder < BinKinematics
Constructor method
methods
function this = BinKinematics_CylinderCylinder(dir,dist,separ)
this = this@BinKinematics(BinKinematics.PARTICLE_PARTICLE,BinKinematics.CYLINDER_CYLINDER);
if (nargin == 3)
this.dir = dir;
this.dist = dist;
this.distc = dist;
this.separ = separ;
end
end
end
Public methods: implementation of super-class declarations
methods
%------------------------------------------------------------------
function setEffParams(~,int)
p1 = int.elem1; p2 = int.elem2;
m1 = p1.material; m2 = p2.material;
% Effective and average parameters
int.eff_radius = p1.radius * p2.radius / (p1.radius + p2.radius);
int.eff_mass = p1.mass * p2.mass / (p1.mass + p2.mass);
if (~isempty(m1.young) && ~isempty(m1.poisson) && ~isempty(m2.young) && ~isempty(m2.poisson))
int.eff_young = 1 / ((1-m1.poisson^2)/m1.young + (1-m2.poisson^2)/m2.young);
if (~isempty(m1.young0) && ~isempty(m2.young0))
int.eff_young0 = 1 / ((1-m1.poisson^2)/m1.young0 + (1-m2.poisson^2)/m2.young0);
end
end
if (~isempty(m1.shear) && ~isempty(m1.poisson) && ~isempty(m2.shear) && ~isempty(m2.poisson))
int.eff_shear = 1 / ((2-m1.poisson)/m1.shear + (2-m2.poisson)/m2.shear);
end
if (~isempty(m1.poisson) && ~isempty(m2.poisson))
int.avg_poisson = (m1.poisson + m2.poisson) / 2;
end
if (~isempty(m1.conduct) && ~isempty(m2.conduct))
int.eff_conduct = m1.conduct * m2.conduct / (m1.conduct + m2.conduct);
int.avg_conduct = (p1.radius + p2.radius) / (p1.radius/m1.conduct + p2.radius/m2.conduct);
end
end
%------------------------------------------------------------------
function this = setRelPos(this,p1,p2)
this.dir = p2.coord - p1.coord;
this.dist = norm(this.dir);
this.distc = this.dist;
this.separ = this.dist - p1.radius - p2.radius;
end
%------------------------------------------------------------------
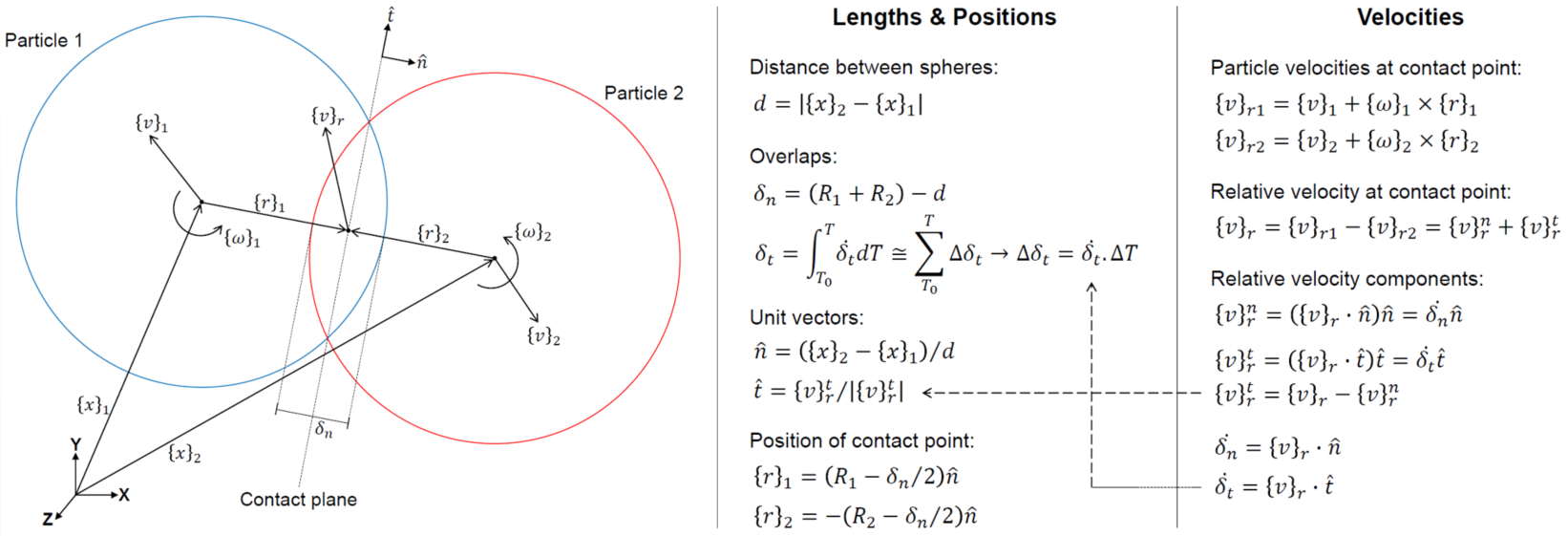
function this = setOverlaps(this,int,dt)
p1 = int.elem1; p2 = int.elem2;
% Normal overlap and unit vector
this.ovlp_n = -this.separ;
this.dir_n = this.dir / this.dist;
% Positions of contact point relative to centroids
% Assumption: half of the overlap
c1 = (p1.radius - this.ovlp_n/2) * this.dir_n;
c2 = -(p2.radius - this.ovlp_n/2) * this.dir_n;
% Velocities at contact point (3D due to cross-product)
w1 = cross([0;0;p1.veloc_rot],[c1(1);c1(2);0]);
w2 = cross([0;0;p2.veloc_rot],[c2(1);c2(2);0]);
vc1 = p1.veloc_trl + w1(1:2);
vc2 = p2.veloc_trl + w2(1:2);
% Relative velocities
this.vel_trl = vc1 - vc2;
this.vel_rot = w1(1:2) + w2(1:2);
this.vel_ang = p1.veloc_rot - p2.veloc_rot;
% Normal overlap rate of change
this.vel_n = dot(this.vel_trl,this.dir_n);
% Tangential relative velocity
vt = this.vel_trl - this.vel_n * this.dir_n;
% Tangential unit vector
if (any(vt))
this.dir_t = vt / norm(vt);
else
this.dir_t = [0;0];
end
% Tangential overlap rate of change
this.vel_t = dot(this.vel_trl,this.dir_t);
% Tangential overlap
if (isempty(this.ovlp_t))
this.ovlp_t = this.vel_t * dt;
else
this.ovlp_t = this.ovlp_t + this.vel_t * dt;
end
end
%------------------------------------------------------------------
function this = setContactArea(this,int)
% Needed properties
d = this.dist;
r1 = int.elem1.radius;
r2 = int.elem2.radius;
r1_2 = r1 * r1;
r2_2 = r2 * r2;
% Contact radius
% (abs to avoid imag. numbers when particles are inside each other)
this.contact_radius = sqrt(abs(r1_2 - ((r1_2-r2_2+d^2)/(2*d))^2));
% Contact correction
if (~isempty(int.corarea))
% Adjusted radius
int.corarea.fixRadius(int);
% Adjusted distance consistent with adjusted radius
this.distc = sqrt(r1^2-this.contact_radius^2) + sqrt(r2^2-this.contact_radius^2);
end
end
%------------------------------------------------------------------
function this = setVoronoiEdge(this,drv,int)
% Indices of common vertices between particles
common = intersect(drv.vor_idx{int.elem1.id},...
drv.vor_idx{int.elem2.id});
% Compute edge length according to number of common vertices
if (length(common) == 2)
if (common(1) == 1) % index of unbounded point is 1 (always the 1st element)
% Assumption: bounded side of the edge is mirroed to the unbounded side
A = polyarea([int.elem1.coord(1),int.elem2.coord(1),drv.vor_vtx(common(2),1)],...
[int.elem1.coord(2),int.elem2.coord(2),drv.vor_vtx(common(2),2)]);
this.vedge = 4 * A / this.dist;
else
pt1 = drv.vor_vtx(common(1),:);
pt2 = drv.vor_vtx(common(2),:);
this.vedge = norm(pt1-pt2);
end
elseif (length(common) == 3) % always 1 unbounded point (index is 1)
idx = common(common~=1);
pt1 = drv.vor_vtx(idx(1),:);
pt2 = drv.vor_vtx(idx(2),:);
this.vedge = norm(pt1-pt2);
else
this.vedge = 0;
end
end
%------------------------------------------------------------------
function addContactForceNormalToParticles(~,int)
int.elem1.force = int.elem1.force + int.cforcen.total_force;
int.elem2.force = int.elem2.force - int.cforcen.total_force;
end
%------------------------------------------------------------------
function addContactForceTangentToParticles(~,int)
int.elem1.force = int.elem1.force + int.cforcet.total_force;
int.elem2.force = int.elem2.force - int.cforcet.total_force;
end
%------------------------------------------------------------------
function addContactTorqueTangentToParticles(this,int)
% Tangential force vector for each particle
ft1 = int.cforcet.total_force;
ft2 = -ft1;
% Lever arm for each particle
% Assumption: half of the overlap
l1 = (int.elem1.radius-this.ovlp_n/2) * this.dir_n;
l2 = -(int.elem2.radius-this.ovlp_n/2) * this.dir_n;
% Torque from tangential contact force (3D due to cross-product)
torque1 = cross([l1(1);l1(2);0],[ft1(1);ft1(2);0]);
torque2 = cross([l2(1);l2(2);0],[ft2(1);ft2(2);0]);
torque1 = torque1(3);
torque2 = torque2(3);
% Add torque from tangential contact force to particles
int.elem1.torque = int.elem1.torque + torque1;
int.elem2.torque = int.elem2.torque + torque2;
end
%------------------------------------------------------------------
function addRollResistTorqueToParticles(~,int)
int.elem1.torque = int.elem1.torque + int.rollres.torque;
int.elem2.torque = int.elem2.torque + int.rollres.torque;
end
%------------------------------------------------------------------
function addDirectConductionToParticles(~,int)
int.elem1.heat_rate = int.elem1.heat_rate + int.dconduc.total_hrate;
int.elem2.heat_rate = int.elem2.heat_rate - int.dconduc.total_hrate;
end
%------------------------------------------------------------------
function addIndirectConductionToParticles(~,int)
int.elem1.heat_rate = int.elem1.heat_rate + int.iconduc.total_hrate;
int.elem2.heat_rate = int.elem2.heat_rate - int.iconduc.total_hrate;
end
end
end