Automation in Construction manuscript companion
Evidence atlas for deep reinforcement learning in construction robotics.
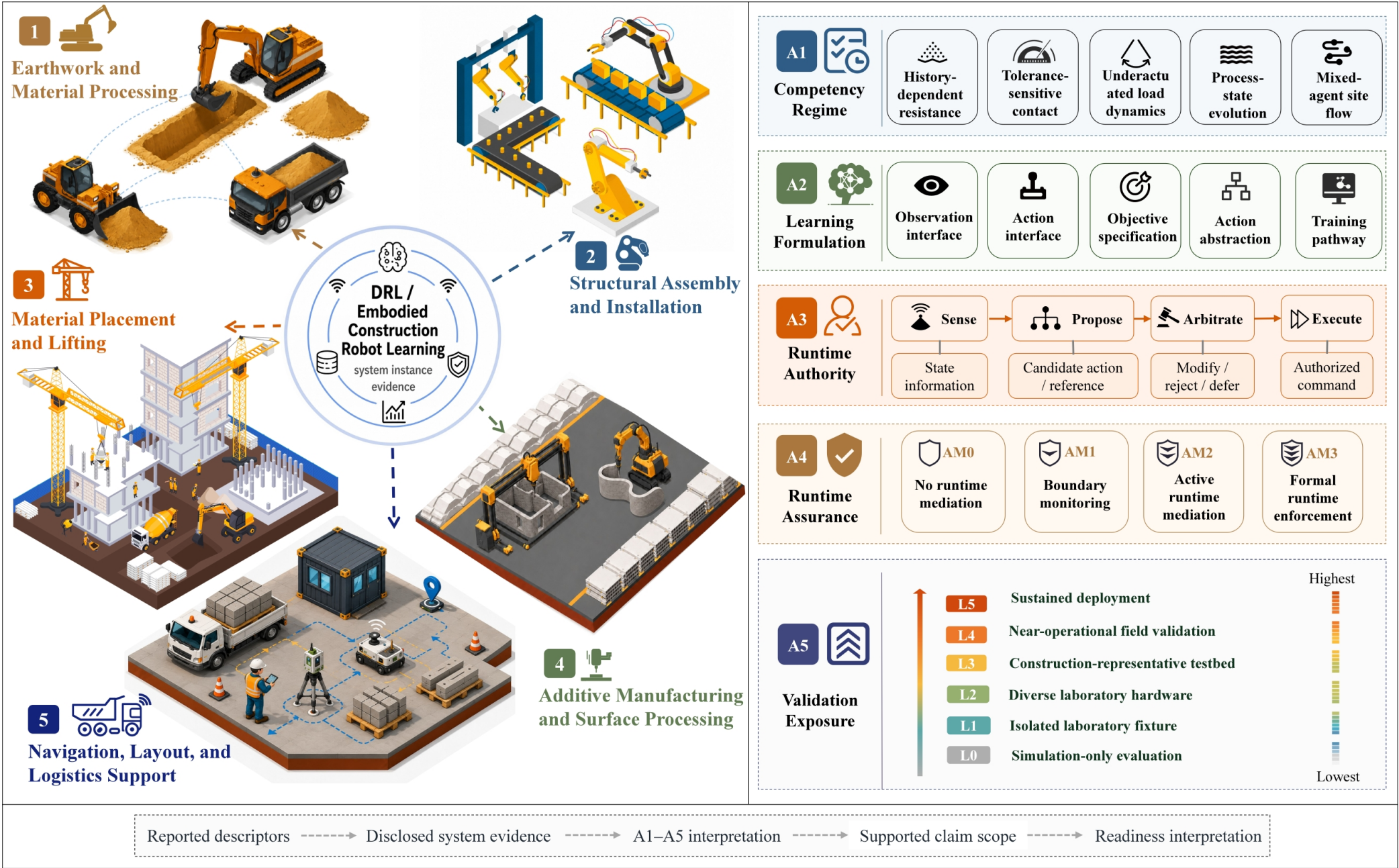
A system-level view of task regimes, learning formulations, runtime authority, runtime assurance, and validation exposure across construction-robotics DRL studies.
Author affiliations
Multi-institutional research team
McGill University
UC Santa Barbara
NVIDIA
New York University
University of British Columbia
Institution names indicate author affiliations only, not institutional endorsement.
At a glance
What the companion repository makes visible.
A1-A5 framework
Five axes keep the review evidence-bound.
The atlas treats each reported system as a bounded claim. Switch axes to see what each dimension contributes to deployment-relevant interpretation.
Readiness diagnostic
Runtime assurance and validation exposure separate demonstration from deployment evidence.
Representative papers
Filter examples by construction-robotics regime.
Figure gallery
Core visuals from the evidence map.
 Graphical overview
Graphical overview
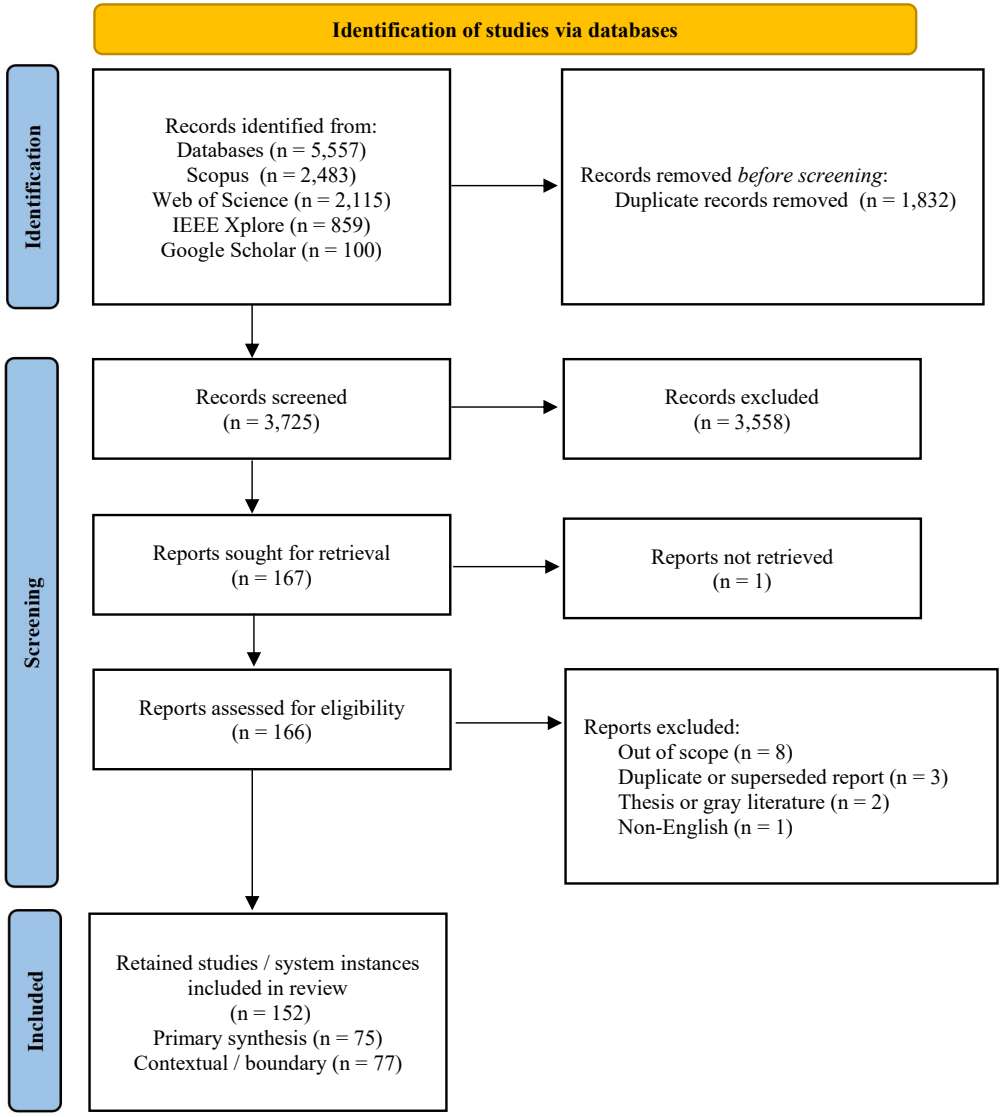 Corpus and screening
Corpus and screening
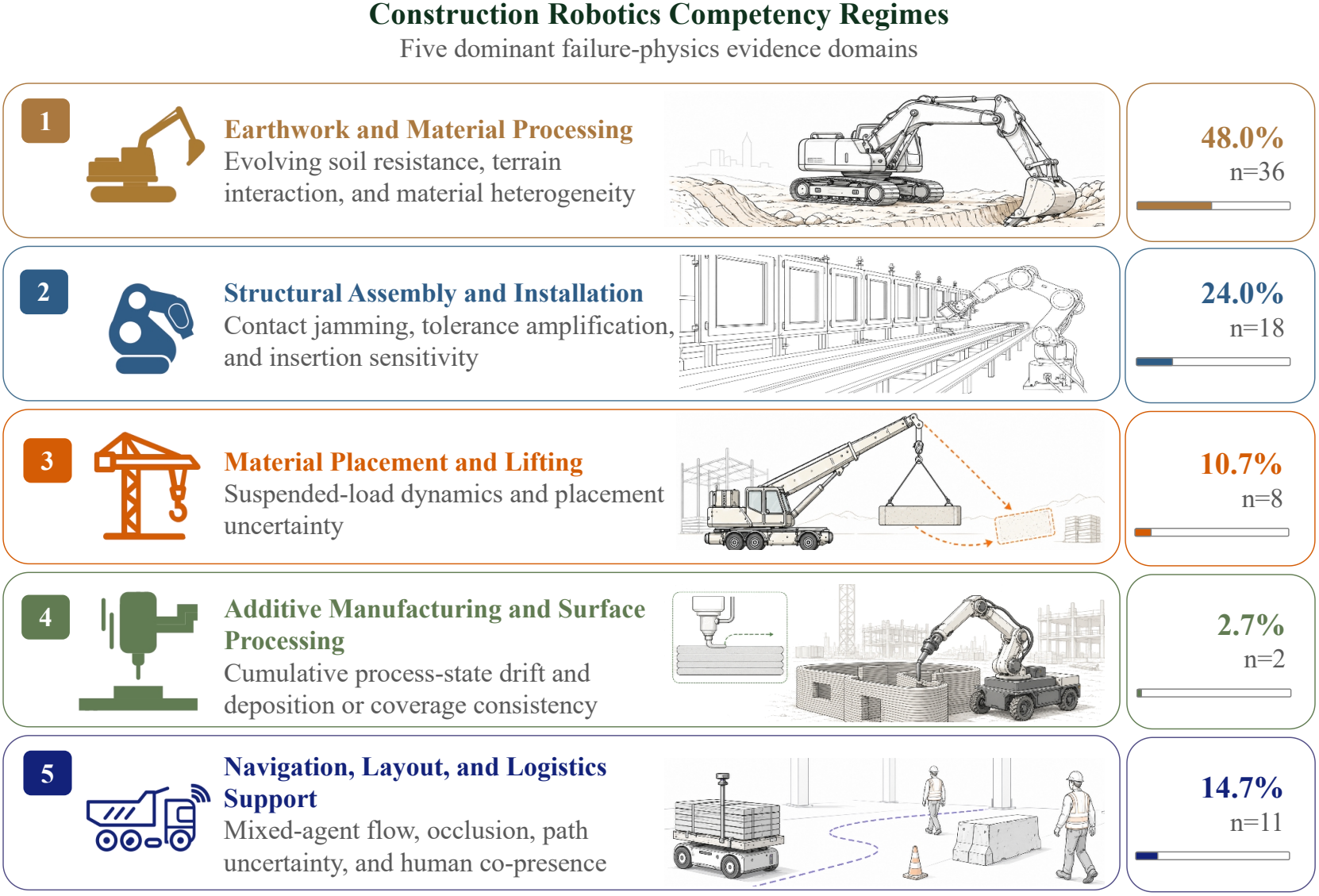 Competency regimes
Competency regimes
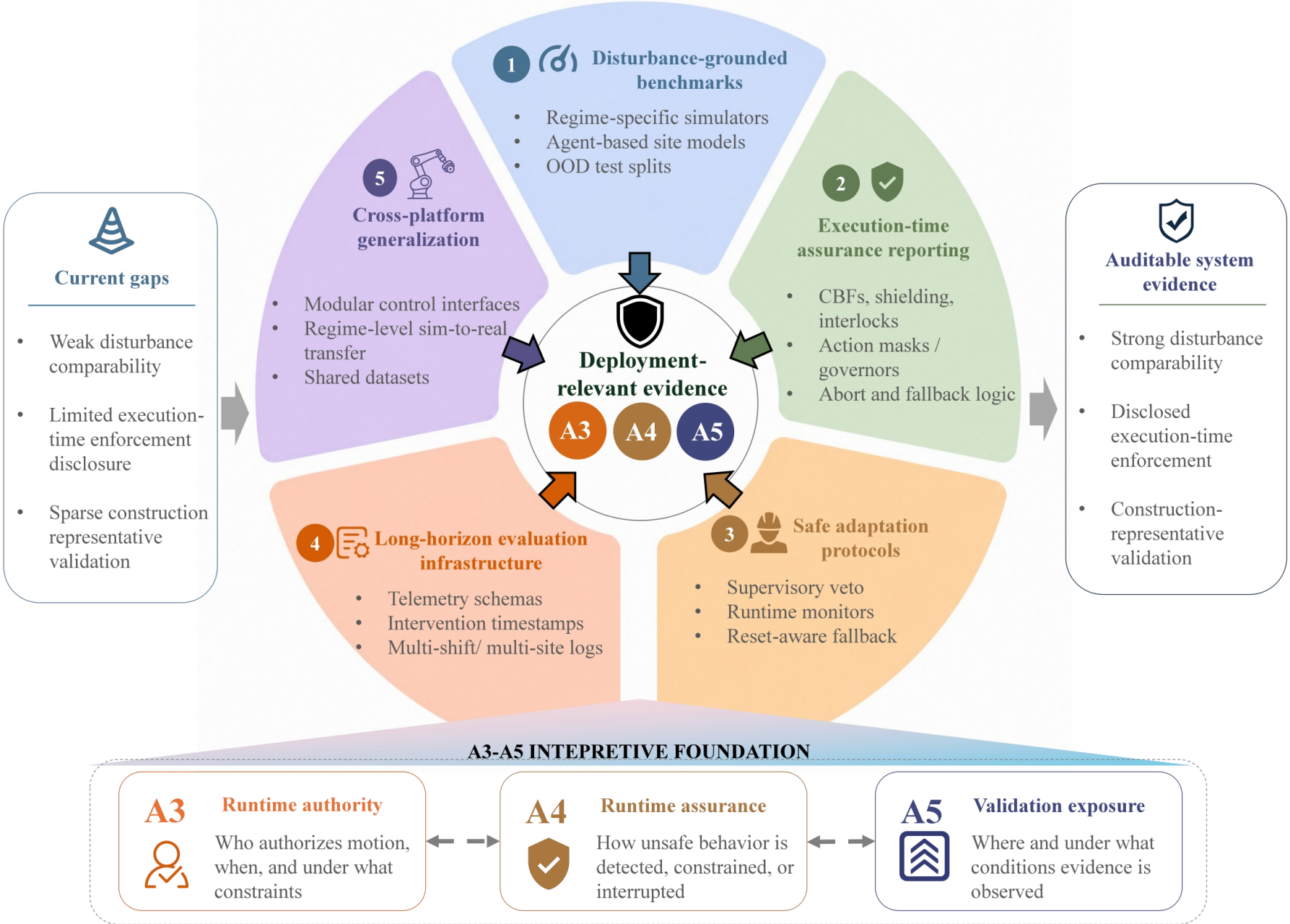 Evidence-closure map
Evidence-closure map
Citation
Manuscript companion metadata.
The citation will be updated after preprint, acceptance, or archival release.
@misc{jin2026drl4conbots,
title = {Deep Reinforcement Learning for Construction Robotics: A System-Level Taxonomy and Evidence Map toward Real-World Readiness},
author = {Jin, Zekai and Wang, Huiguang and Tang, Yihong and Dong, Zhen and Feng, Chen and Shao, Yi},
year = {2026},
howpublished = {Companion repository for a manuscript under review in Automation in Construction},
url = {https://github.com/ZekaiJ/DRL4CONBOTS}
}